Neural Networks
Robert Minneker
2026-01-29
Sources
Content derived from: J&M Ch. 6
Part 1: Foundations of Neural Networks
Neural networks emerged from decades of research on connectionist computation
- Early foundations: McCulloch & Pitts (1943), Hebb (1949), Turing (1948)
- Turing’s insight: Complex behaviors emerge from many simple interacting units
- The connectionist paradigm: computation through distributed, parallel processing
1943
McCulloch-Pitts
Neuron
Neuron
→
1958
Rosenblatt's
Perceptron
Perceptron
→
1986
Backpropagation
→
2012
Deep Learning
Revolution
Revolution
→
2017
Transformers
The perceptron was the first learnable neural architecture
- Rosenblatt (1958) formalized learning from labeled examples
- Update rule adjusts weights based on prediction errors:
\[ \mathbf{w} \leftarrow \mathbf{w} + \eta (y - \hat{y}) \mathbf{x} \]
- Enabled learning of linear decision boundaries in input space
Perceptron Can Learn
AND, OR, NOT gates
Linearly separable problems
Perceptron Cannot Learn
XOR gate
Non-linearly separable
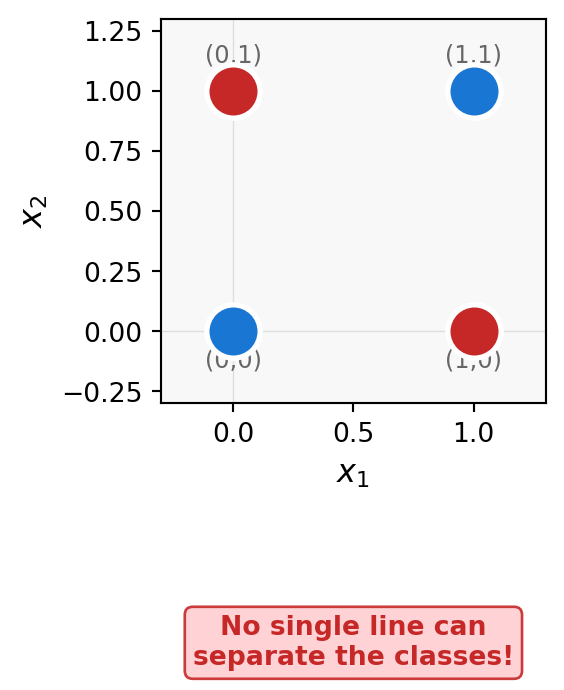
Why XOR breaks the perceptron
Solution: Add a hidden layer to create a non-linear decision boundary.
Backpropagation enabled training of multi-layer networks
- Rumelhart, Hinton, and Williams (1986) introduced error backpropagation
- Uses the chain rule to compute gradients through layers:
\[ \frac{\partial \mathcal{L}}{\partial \theta} = \frac{\partial \mathcal{L}}{\partial \mathbf{a}} \cdot \frac{\partial \mathbf{a}}{\partial \theta} \]
- Allowed training networks with hidden layers, overcoming perceptron limitations
Modern architectures build on these foundational principles
- Hierarchical representation learning extracts increasingly abstract features
- Non-linear function approximation enables modeling complex relationships
- Scalability through parallelization and specialized hardware (GPUs, TPUs)
Applications span:
- NLP: machine translation, question answering, text generation
- Vision: object recognition, image segmentation
- Reinforcement learning: game playing, robotics
A neural network is a computational graph of interconnected processing units
- Each neuron computes a weighted sum of inputs plus bias, then applies an activation:
\[ h = f(\mathbf{w}^\top \mathbf{x} + b) \]
- \(\mathbf{w}\): weight vector (learned parameters)
- \(\mathbf{x}\): input vector
- \(b\): bias term
- \(f\): nonlinear activation function
Networks are organized into layers with distinct roles
Input Layer
x₁
x₂
x₃
→
Hidden Layer(s)
h₁
h₂
→
Output Layer
ŷ₁
ŷ₂
- Input layer: Receives raw features (e.g., word embeddings)
- Hidden layers: Learn intermediate representations
- Output layer: Produces predictions (often via softmax)
Feedforward networks process information in one direction only
- Data flows from input → hidden → output with no cycles
- Each layer’s output becomes the next layer’s input
- The entire computation is a composition of functions:
\[ \hat{y} = f^{[L]}(f^{[L-1]}(\cdots f^{[1]}(\mathbf{x})\cdots)) \]
Recurrent networks can model sequential dependencies through cycles
- Allow information to persist across time steps
- Hidden state \(\mathbf{h}_t\) encodes history of previous inputs
- Essential for language modeling, speech recognition, time series
Feedforward
Fixed-size input → Fixed-size output
Image classification, sentiment analysis
Recurrent
Sequence → Sequence or output
Language modeling, machine translation
Neural network computation is fundamentally linear algebra
- Inputs, parameters, and activations are vectors and matrices
- Core operation: matrix-vector multiplication plus bias
\[ \mathbf{z} = \mathbf{W}\mathbf{x} + \mathbf{b} \]
- Dimensions must align: if \(\mathbf{x} \in \mathbb{R}^d\) and \(\mathbf{W} \in \mathbb{R}^{m \times d}\), then \(\mathbf{z} \in \mathbb{R}^m\)
Dot products measure vector similarity
\[ \mathbf{a} \cdot \mathbf{b} = \|\mathbf{a}\| \|\mathbf{b}\| \cos(\theta) \]
Similar (θ ≈ 0°)
→ →
a · b > 0
Vectors point same direction
Orthogonal (θ = 90°)
→ ↑
a · b = 0
Vectors are unrelated
Opposite (θ ≈ 180°)
→ ←
a · b < 0
Vectors point opposite
Neural networks use dot products to measure relevance between vectors
Matrix multiplication computes all pairwise dot products
- If \(\mathbf{Q} \in \mathbb{R}^{n \times d}\) and \(\mathbf{K} \in \mathbb{R}^{m \times d}\), then:
\[ (\mathbf{Q}\mathbf{K}^\top)_{ij} = \mathbf{q}_i \cdot \mathbf{k}_j \]
Q (3×d)
q₁
q₂
q₃
×
KT (d×4)
k₁
k₂
k₃
k₄
=
Similarity (3×4)
q₁·k₁
q₁·k₂
q₁·k₃
q₁·k₄
q₂·k₁
q₂·k₂
q₂·k₃
q₂·k₄
q₃·k₁
q₃·k₂
q₃·k₃
q₃·k₄
One matrix multiply computes all 12 similarities in parallel!
Activation functions introduce essential nonlinearity
After computing \(\mathbf{z}\), we apply an activation function elementwise:
\[ \mathbf{h} = \phi(\mathbf{z}) \]
ReLU
max(0, z)
Simple, fast, sparse
Sigmoid
1/(1+e⁻ᶻ)
Output in (0,1)
Tanh
(eᶻ-e⁻ᶻ)/(eᶻ+e⁻ᶻ)
Output in (-1,1)
Activation function shapes determine gradient flow
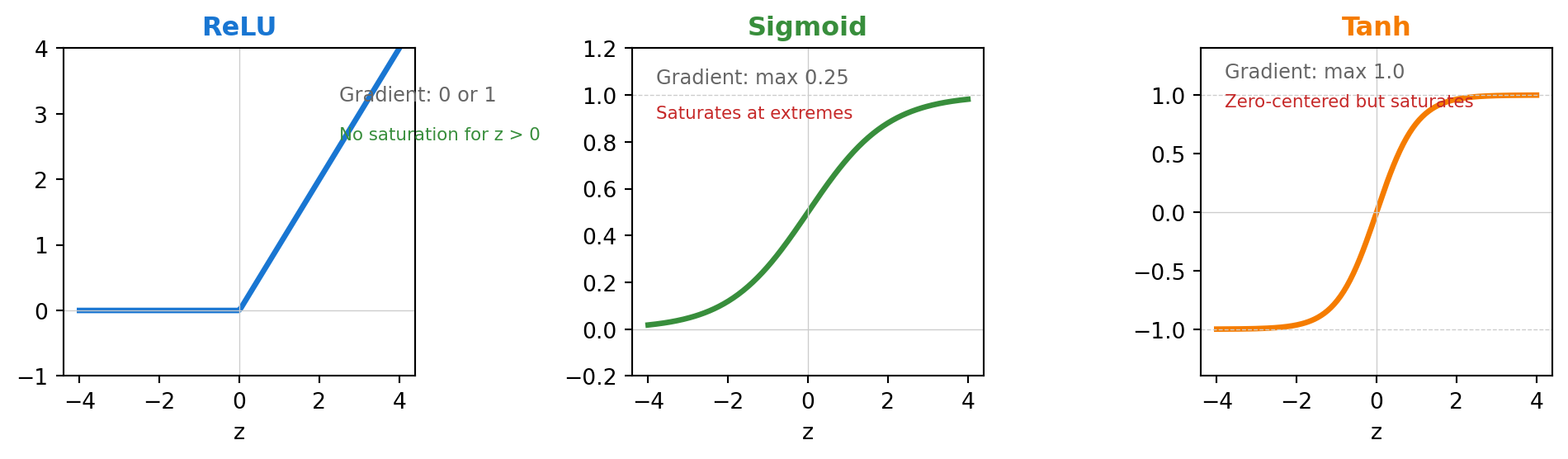
Why ReLU dominates: Constant gradient (1) for positive inputs prevents vanishing gradients in deep networks.
The softmax function converts scores to probabilities
- Transforms a vector \(\mathbf{z}\) into a probability distribution:
\[ \operatorname{softmax}(z_i) = \frac{\exp(z_i)}{\sum_{j=1}^d \exp(z_j)} \]
- Guarantees: \(\sum_i \operatorname{softmax}(z_i) = 1\) and \(0 < \operatorname{softmax}(z_i) < 1\)
Part 2: Feedforward Neural Networks
Each layer transforms its input through weights, bias, and activation
For layer \(i\):
\[ \mathbf{x}^{[i]} = f^{[i]}\left( \mathbf{W}^{[i]} \mathbf{x}^{[i-1]} + \mathbf{b}^{[i]} \right) \]
- \(\mathbf{W}^{[i]}\): learnable weight matrix
- \(\mathbf{b}^{[i]}\): learnable bias vector
- \(f^{[i]}\): activation function
x⁽ⁱ⁻¹⁾
→
W⁽ⁱ⁾x + b⁽ⁱ⁾
→
f⁽ⁱ⁾(·)
→
x⁽ⁱ⁾
Activation functions serve different purposes in different layers
| Location | Common Choice | Purpose |
|---|---|---|
| Hidden layers | ReLU, GELU | Introduce nonlinearity, sparse activation |
| Binary output | Sigmoid | Probability in [0,1] |
| Multi-class output | Softmax | Probability distribution |
| Regression output | None (linear) | Unbounded real values |
The universal approximation theorem guarantees theoretical expressivity
Theorem: A feedforward network with one hidden layer and sufficient neurons can approximate any continuous function on a compact domain to arbitrary precision.
\[ \forall \epsilon > 0, \exists \hat{f}: \sup_{x \in K} |f(x) - \hat{f}(x)| < \epsilon \]
But this doesn’t mean shallow networks are always practical:
- May require exponentially many neurons
- Says nothing about learnability or generalization
Depth enables efficient representation of compositional structure
Shallow Network
O(2ⁿ)
neurons for some functions
Deep Network
O(n)
neurons for same functions
- Telgarsky (2016): Some functions require exponentially more units in shallow vs. deep networks
- Depth captures hierarchical/compositional structure naturally
- Language has recursive, hierarchical structure → depth helps
Part 3: Learning and Training Algorithms
Supervised learning optimizes parameters using labeled examples
- Training data: pairs \((\mathbf{x}, y)\) of inputs and target outputs
- Model predicts: \(\hat{y} = f_\theta(\mathbf{x})\)
- Objective: minimize average loss over training set
\[ \mathcal{L}(\theta) = \frac{1}{N} \sum_{i=1}^N \ell\big(f_\theta(\mathbf{x}_i), y_i\big) \]
Loss functions measure prediction quality
Cross-Entropy (Classification)
ℓ = −Σₖ yₖ log ŷₖ
Penalizes low probability on correct class
MSE (Regression)
ℓ = (y − ŷ)²
Penalizes squared deviation from target
Cross-entropy loss for classification:
\[ \ell_{\text{CE}}(\hat{\mathbf{y}}, \mathbf{y}) = -\sum_{k=1}^K y_k \log \hat{y}_k \]
NLP applications of supervised learning span many tasks
| Task | Input \(\mathbf{x}\) | Output \(y\) |
|---|---|---|
| POS tagging | Word + context | POS tag (noun, verb, etc.) |
| Sentiment | Sentence/document | Sentiment class |
| NER | Word + context | Entity type or O |
| Text classification | Document | Topic/category |
Backpropagation computes gradients efficiently via the chain rule
- We need \(\frac{\partial L}{\partial W^{[l]}}\) for each layer to update weights
- Backprop propagates error signals backward through the network
\[ \frac{\partial L}{\partial W^{[l]}} = \delta^{[l]} (a^{[l-1]})^T \]
where \(\delta^{[l]} = \frac{\partial L}{\partial z^{[l]}}\) is the error signal at layer \(l\).
Error signals propagate backward through the network
Forward Pass
Input x
→
Hidden h¹
→
Hidden h²
→
Output ŷ
Backward Pass
∂L/∂ŷ
←
δ²
←
δ¹
←
∂L/∂x
The recursive error signal computation:
\[ \delta^{[l]} = \left( W^{[l+1]}\right)^T \delta^{[l+1]} \odot \sigma' (z^{[l]}) \]
Gradients drive parameter updates via gradient descent
Weight update rule:
\[ W^{[l]} \leftarrow W^{[l]} - \eta \frac{\partial L}{\partial W^{[l]}} \]
\[ b^{[l]} \leftarrow b^{[l]} - \eta \frac{\partial L}{\partial b^{[l]}} \]
- \(\eta\): learning rate (critical hyperparameter)
- Too high → unstable, may diverge; Too low → slow convergence
Gradient descent navigates the loss landscape
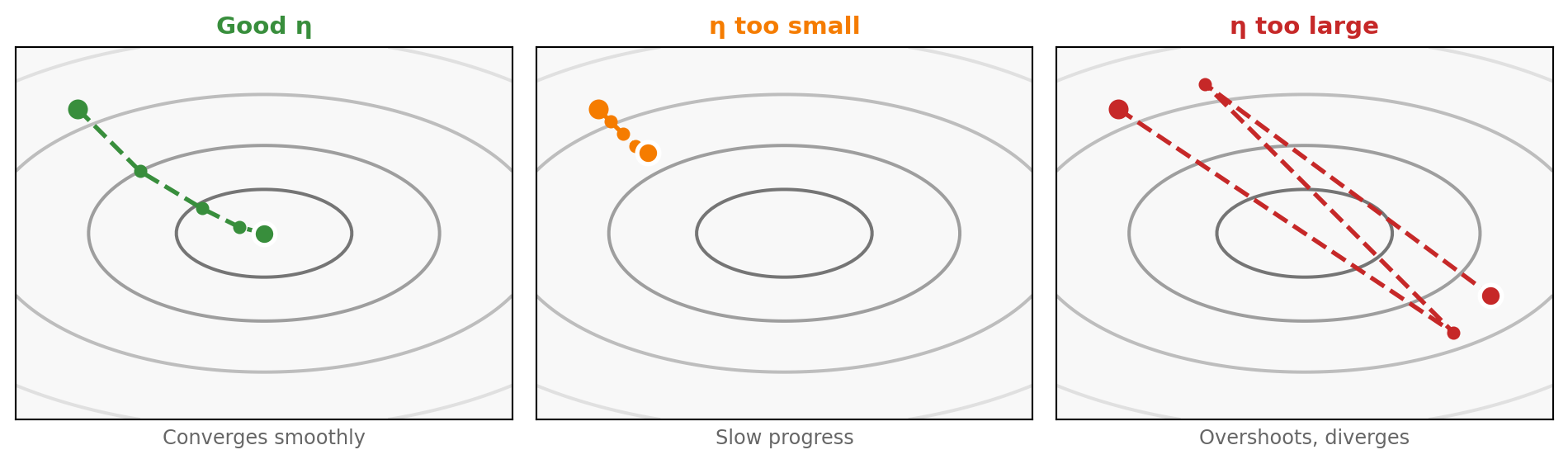
Gradient descent follows the steepest downhill direction; step size η determines how far we move each update.
Backpropagation is not an optimizer—it computes gradients for optimizers
Common misconception: Backprop = training algorithm
Reality:
- Backprop: efficient gradient computation method
- SGD/Adam/etc.: optimization algorithms that use gradients
- Together they enable training, but they’re distinct concepts
Loss L
→
Backpropagation
→
Gradients ∇L
→
Optimizer
(SGD, Adam)
(SGD, Adam)
→
New Weights
SGD processes mini-batches for efficient, noisy updates
Stochastic Gradient Descent:
\[ \theta_{t+1} = \theta_t - \eta \nabla_\theta L(\theta_t; \mathcal{B}_t) \]
- \(\mathcal{B}_t\): random mini-batch at step \(t\)
- Noisy gradients can help escape local minima
- Much faster than full-batch gradient descent
Adam combines momentum and adaptive learning rates
Adam update equations:
\[ m_t = \beta_1 m_{t-1} + (1 - \beta_1) \nabla_\theta L(\theta_t) \]
\[ v_t = \beta_2 v_{t-1} + (1 - \beta_2) (\nabla_\theta L(\theta_t))^2 \]
\[ \theta_{t+1} = \theta_t - \eta \frac{m_t}{\sqrt{v_t} + \epsilon} \]
- \(m_t\): momentum (smoothed gradient)
- \(v_t\): adaptive scaling (per-parameter)
- Default: \(\beta_1=0.9\), \(\beta_2=0.999\), \(\epsilon=10^{-8}\)
Optimizers behave differently on complex loss surfaces
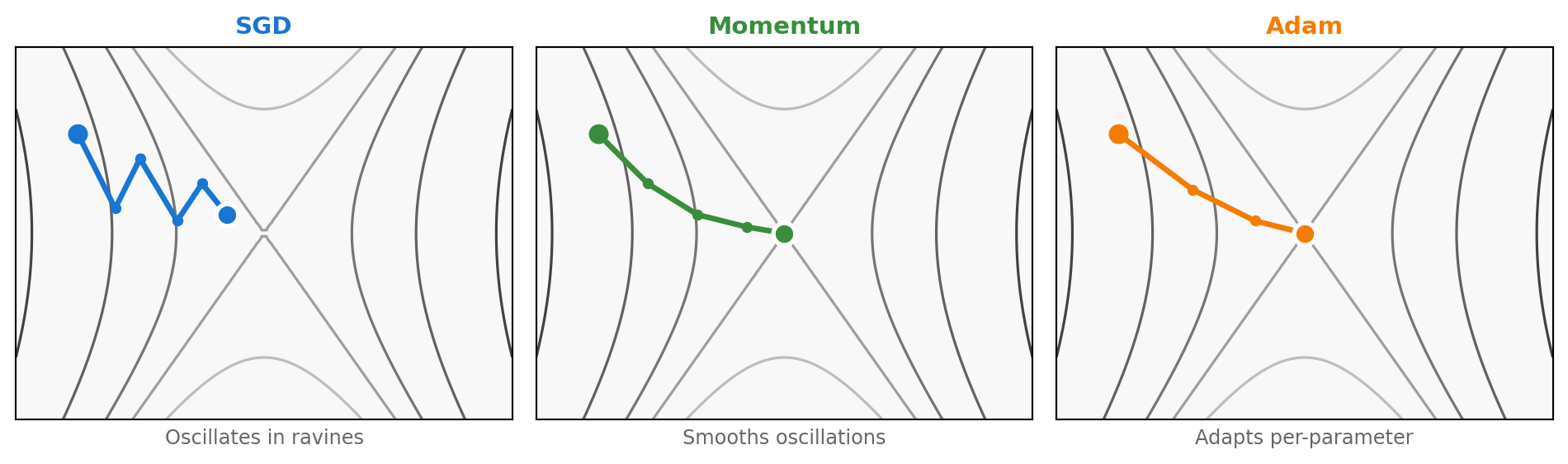
Adam combines momentum’s smoothing with per-parameter learning rate scaling—faster and more robust convergence.
Regularization prevents overfitting by constraining model capacity
L2 Regularization
L' = L + λ‖θ‖²
Penalizes large weights
Dropout
hᵢ = rᵢ · hᵢ
rᵢ ~ Bernoulli(p)
Early Stopping
Stop when val↑
Monitor validation loss
Dropout forces the network to learn redundant representations
- During training: randomly set fraction \(p\) of activations to 0
- During inference: use all neurons, scale by \((1-p)\)
- Effect: no single neuron can become too important
Training (with dropout)
→
→
Some neurons "dropped"
Inference (no dropout)
→
→
All neurons active
Dropout signficantly reduces overfitting
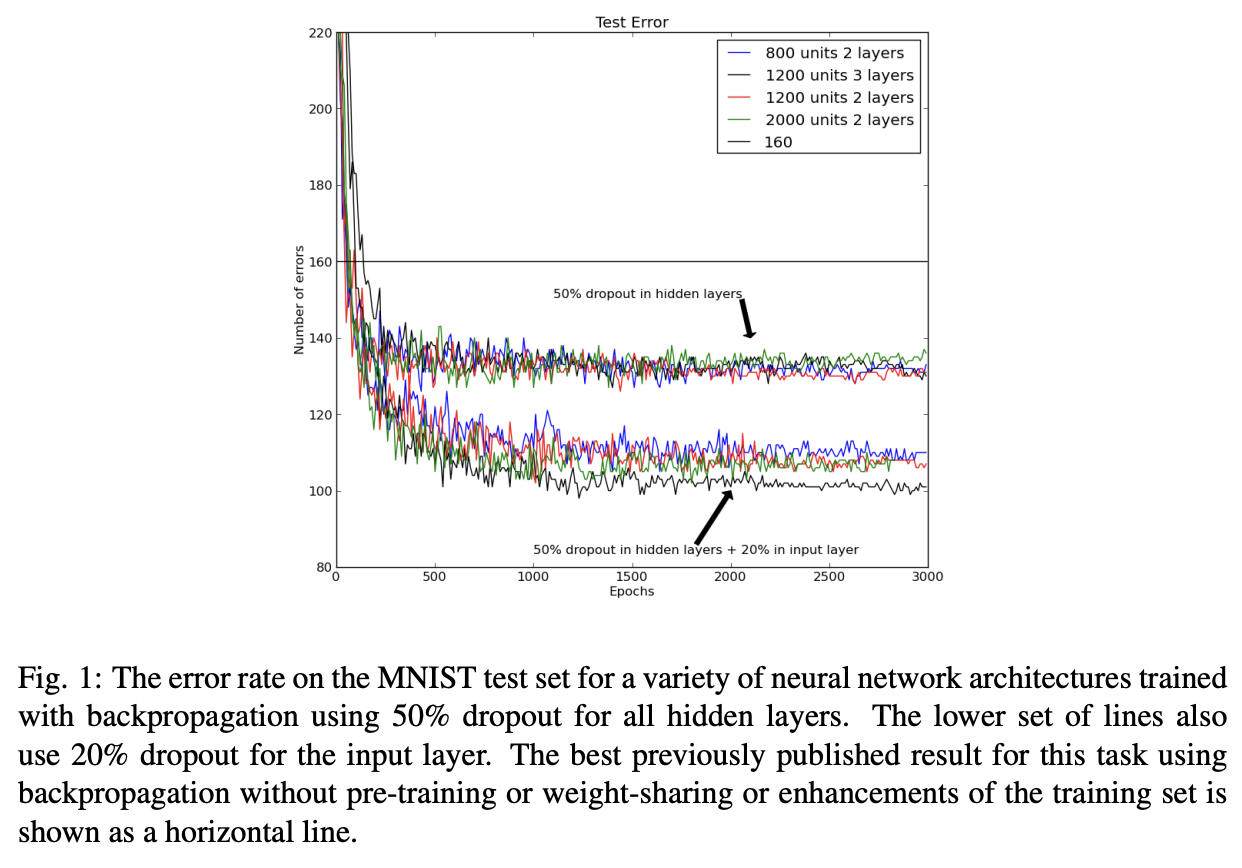
Improving neural networks by preventing co-adaptation of feature detectors (Hinton et al., 2012)
Part 4: Advanced Architectures and Extensions
Vanishing gradients make training deep networks difficult
- Gradients shrink exponentially when propagated through many layers
- For sigmoid: \(\sigma'(z) \leq 0.25\), so gradient decays by at least 4× per layer
\[ \delta^{[l]} = (W^{[l+1]})^T \delta^{[l+1]} \odot \sigma'(z^{[l]}) \]
- With 10 layers: gradient shrinks by \(\approx 4^{10} \approx 10^6\)
Exploding gradients cause training instability
- The opposite problem: gradients grow exponentially
- Occurs when \(\|W^{[l]}\| > 1\) and compounds across layers
- Symptoms: NaN losses, weights becoming infinite
Solutions:
- Gradient clipping: \(g \leftarrow g \cdot \frac{\tau}{\|g\|}\) if \(\|g\| > \tau\)
- Careful weight initialization
- Batch normalization
Proper initialization maintains gradient flow
Xavier/Glorot initialization:
\[ \text{Var}[W_{ij}] = \frac{2}{n_{in} + n_{out}} \]
He initialization (for ReLU):
\[ \text{Var}[W_{ij}] = \frac{2}{n_{in}} \]
- Goal: keep activation and gradient variance stable across layers
- Critical for training networks with 10+ layers
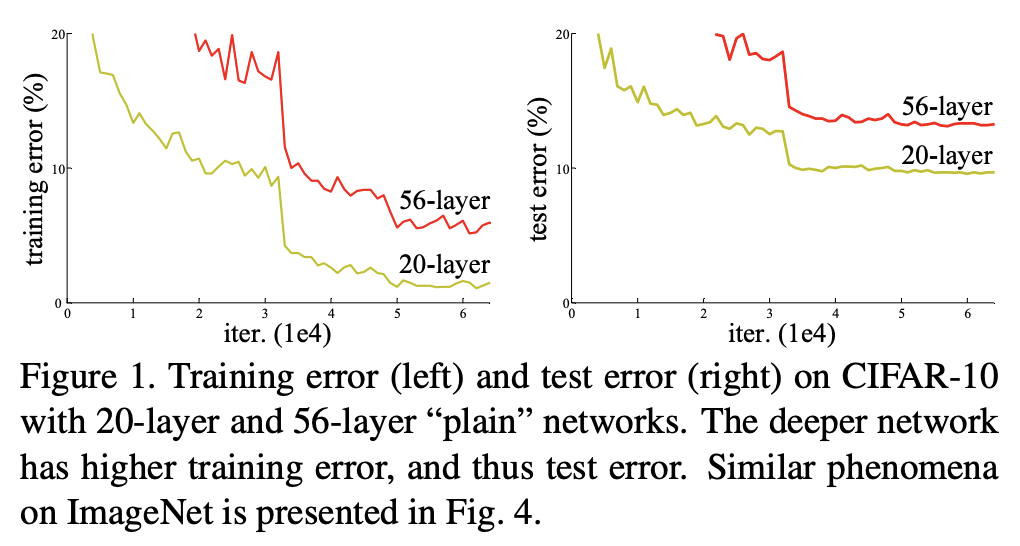
Residual connections enable training of very deep networks
- Key idea: Add input directly to output via “skip connection”
\[ \mathbf{h}^{[l+1]} = f(\mathbf{h}^{[l]}) + \mathbf{h}^{[l]} \]
h⁽ˡ⁾
↓
f(·)
↓
skip
+
→
h⁽ˡ⁺¹⁾
Why it helps: Gradient flows directly through the skip connection:
\[ \frac{\partial \mathbf{h}^{[l+1]}}{\partial \mathbf{h}^{[l]}} = \frac{\partial f}{\partial \mathbf{h}^{[l]}} + \mathbf{I} \]
Residual connections: empirical evidence
Layer normalization stabilizes training of deep networks
\[ \text{LayerNorm}(\mathbf{x}) = \gamma \odot \frac{\mathbf{x} - \mu}{\sigma + \epsilon} + \beta \]
- \(\mu, \sigma\): mean and std computed across features (per example)
- \(\gamma, \beta\): learnable scale and shift parameters
Batch Normalization
Normalize across batch dimension
• Depends on batch statistics
• Different behavior train vs test
• Problematic for variable-length sequences
• Different behavior train vs test
• Problematic for variable-length sequences
Layer Normalization
Normalize across feature dimension
• Independent of batch size
• Same behavior train and test
• Works with any sequence length ✓
• Same behavior train and test
• Works with any sequence length ✓
Comparing normalization techniques: BatchNorm vs LayerNorm vs RMSNorm
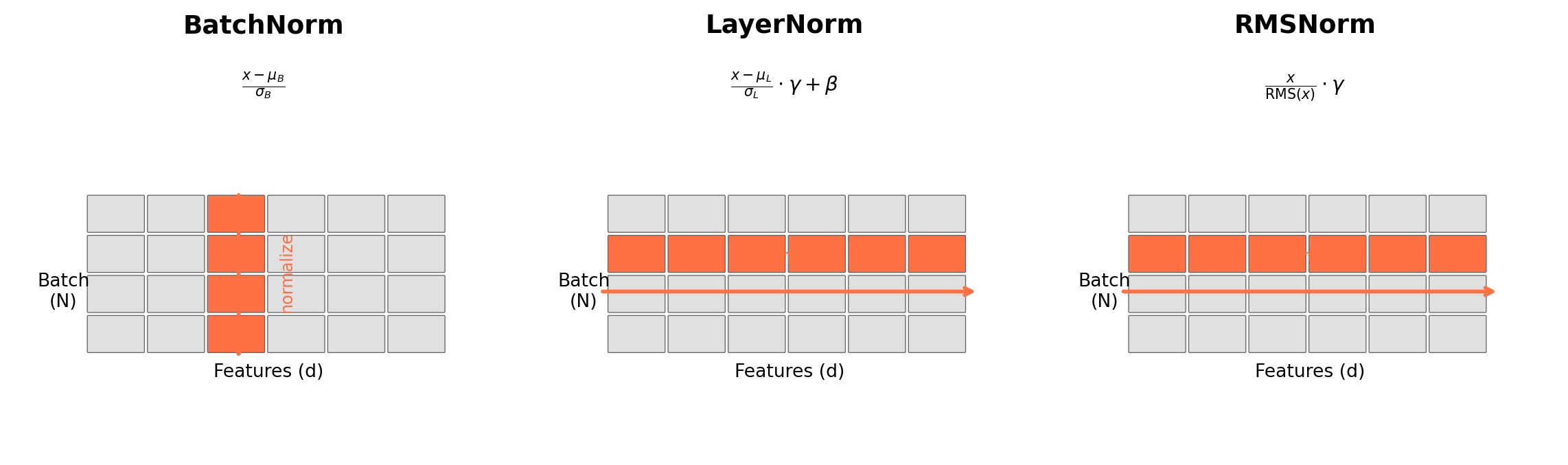
| BatchNorm | LayerNorm | RMSNorm | |
|---|---|---|---|
| Normalizes | Batch dim | Feature dim | Feature dim |
| Train/Test | Different | Same | Same |
| Used in | CNNs | Transformers | LLaMA, Gemma |
RNNs model sequences by maintaining state across time steps
\[ \mathbf{h}_t = f(\mathbf{W}_{xh} \mathbf{x}_t + \mathbf{W}_{hh} \mathbf{h}_{t-1} + \mathbf{b}_h) \]
h₁
↑
x₁
→
h₂
↑
x₂
→
h₃
↑
x₃
→
h₄
↑
x₄
→
ŷ
- Hidden state \(\mathbf{h}_t\) encodes information from \(x_1, \ldots, x_t\)
- Same parameters (\(\mathbf{W}_{xh}, \mathbf{W}_{hh}\)) used at every time step
The RNN sequential bottleneck limits parallelization
- \(\mathbf{h}_t\) depends on \(\mathbf{h}_{t-1}\) creates a dependency chain
- Cannot compute \(\mathbf{h}_5\) until \(\mathbf{h}_1, \mathbf{h}_2, \mathbf{h}_3, \mathbf{h}_4\) are finished
h₁
WAIT
→
h₂
WAIT
→
h₃
WAIT
→
h₄
WAIT
→
h₅
O(T) sequential steps for sequence length T
Implications:
- Cannot fully utilize parallel hardware (GPUs have thousands of cores)
- Training time scales linearly with sequence length
- Key question: What if we could process all tokens at once?
Autoregressive vs bidirectional processing
Autoregressive (left-to-right): Each position only sees the past
\[ P(x_1, x_2, \ldots, x_n) = \prod_{t=1}^{n} P(x_t | x_1, \ldots, x_{t-1}) \]
Bidirectional: Each position sees the entire sequence
Autoregressive (GPT)
The
cat
sat
?
?
Position 3 sees only positions 1-2
Bidirectional (BERT)
The
cat
[MASK]
on
mat
Position 3 sees all positions
Standard RNNs struggle with long-range dependencies
"The cat,
which was sitting on the mat in the living room where my grandmother used to read her favorite novels during the winter evenings,
was hungry."
The verb "was" must agree with "cat" despite 20+ intervening words.
- Gradient signal degrades over long distances
- LSTM and GRU use gating mechanisms to preserve information
- Transformers use attention to directly connect distant positions
Context as a weighted combination of representations
- What if we could directly access all previous representations?
- Key insight: compute a weighted sum based on relevance
\[ \text{output}_t = \sum_{j=1}^{t} \alpha_{tj} \cdot \mathbf{v}_j \]
- \(\alpha_{tj}\): attention weight (how relevant is position \(j\) to position \(t\)?)
- \(\mathbf{v}_j\): value vector at position \(j\)
v₁
α₄₁ = 0.1
v₂
α₄₂ = 0.5
v₃
α₄₃ = 0.3
→
output₄
Σ αᵢ · vᵢ
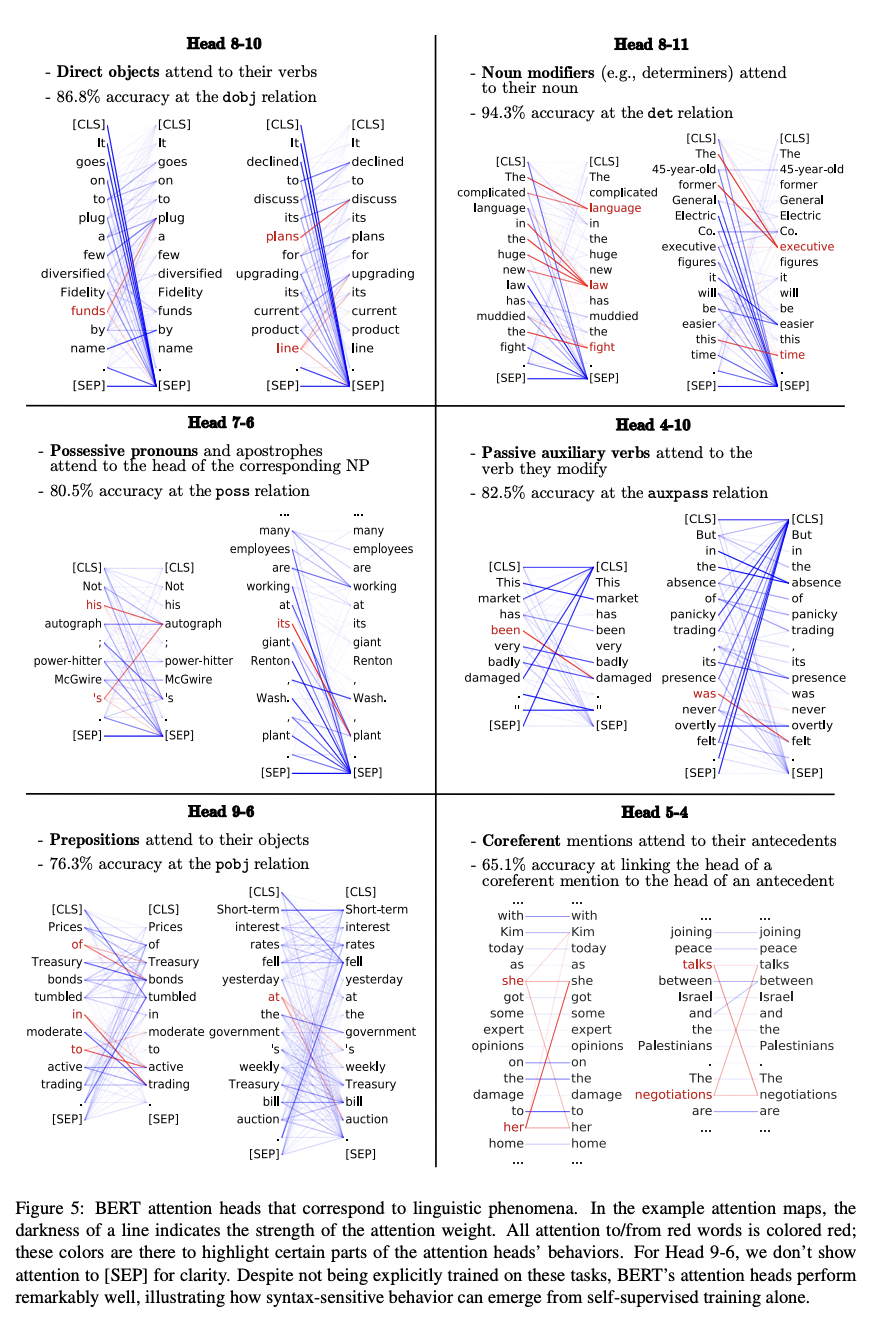
Attention weights reveal what the model focuses on
Attention from "it" in: "The cat sat on the mat because it was tired"
The
cat
sat
on
the
mat
because
it
was
it →
0.05
0.45
0.10
0.03
0.02
0.15
0.05
0.10
0.05
What attention reveals:
The pronoun "it" attends most strongly to "cat" (0.45)—the model has learned coreference!
Darker = higher attention weight
BERT attention learns coreference resolution
Position information must be explicitly encoded
- Without recurrence, order information is lost
- “Dog bit man” and “man bit dog” would be identical!
Without Position Info
{dog, bit, man} = {man, bit, dog}
Bag of words—order lost!
With Position Encoding
(dog, 1), (bit, 2), (man, 3)
Order preserved via position
Key question: How do we inject position information into parallel architectures?
Sinusoidal position encodings (Vaswani et al., 2017)
Add a position-dependent vector to each token embedding:
\[ PE_{(pos, 2i)} = \sin\left(\frac{pos}{10000^{2i/d}}\right) \quad PE_{(pos, 2i+1)} = \cos\left(\frac{pos}{10000^{2i/d}}\right) \]
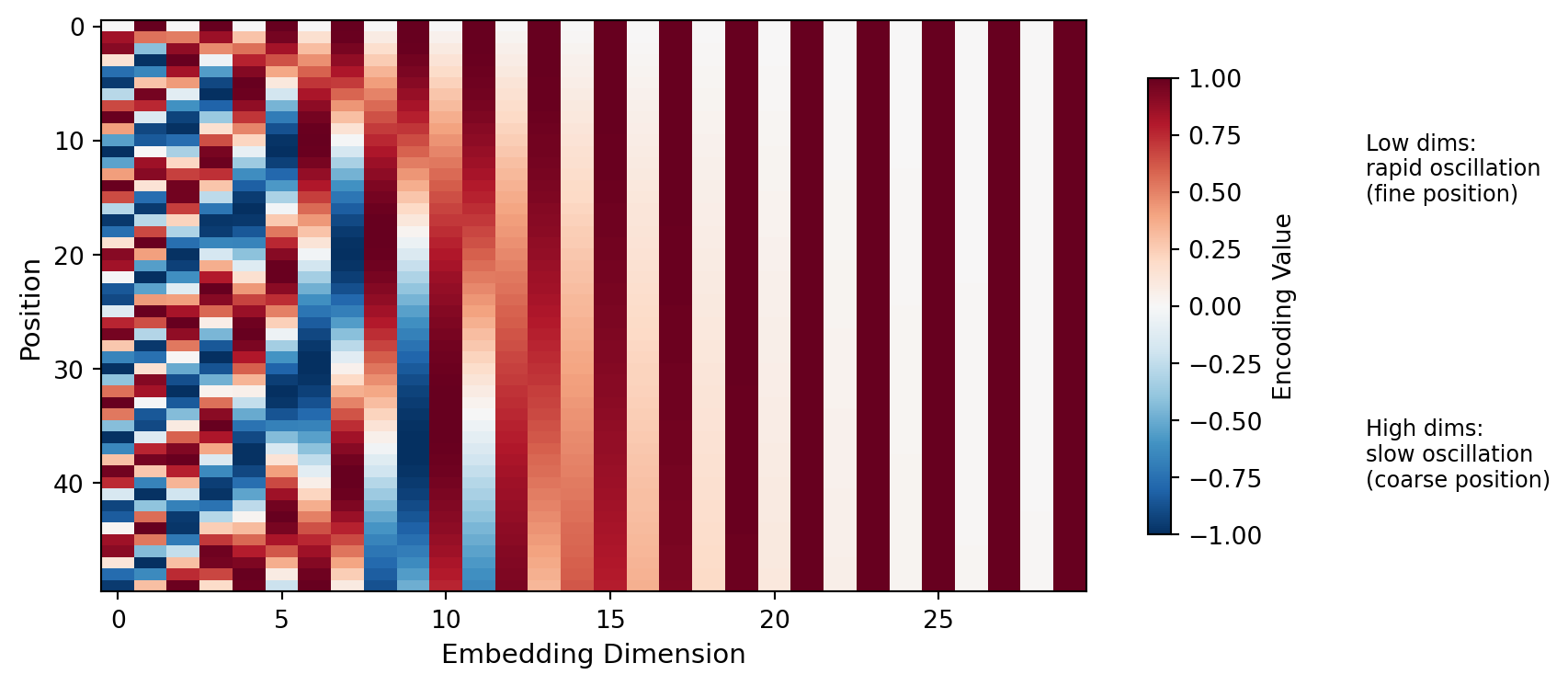
Key properties: Each position gets a unique encoding; relative positions computable via linear transformation; generalizes to longer sequences.
Part 5: Applications
Neural networks power core NLP tasks
| Task | Architecture | Output |
|---|---|---|
| Text classification | Feedforward / CNN / Transformer | Class probabilities (softmax) |
| Language modeling | RNN / Transformer | Next token probabilities |
| Sequence labeling | BiLSTM / Transformer | Tag per token |
| Machine translation | Encoder-decoder | Target sequence |
Text classification assigns labels to documents
Document
'Great movie!'
'Great movie!'
→
Embedding
Layer
Layer
→
Encoder
(CNN/LSTM/Transformer)
(CNN/LSTM/Transformer)
→
Pooling
→
Dense
→
Softmax
→
P(pos)=0.92
P(neg)=0.08
P(neg)=0.08
Applications: Sentiment analysis, spam detection, topic classification
Language modeling predicts the next token in a sequence
\[ P(w_t | w_1, \ldots, w_{t-1}) = \text{softmax}(\mathbf{W} \mathbf{h}_{t-1} + \mathbf{b}) \]
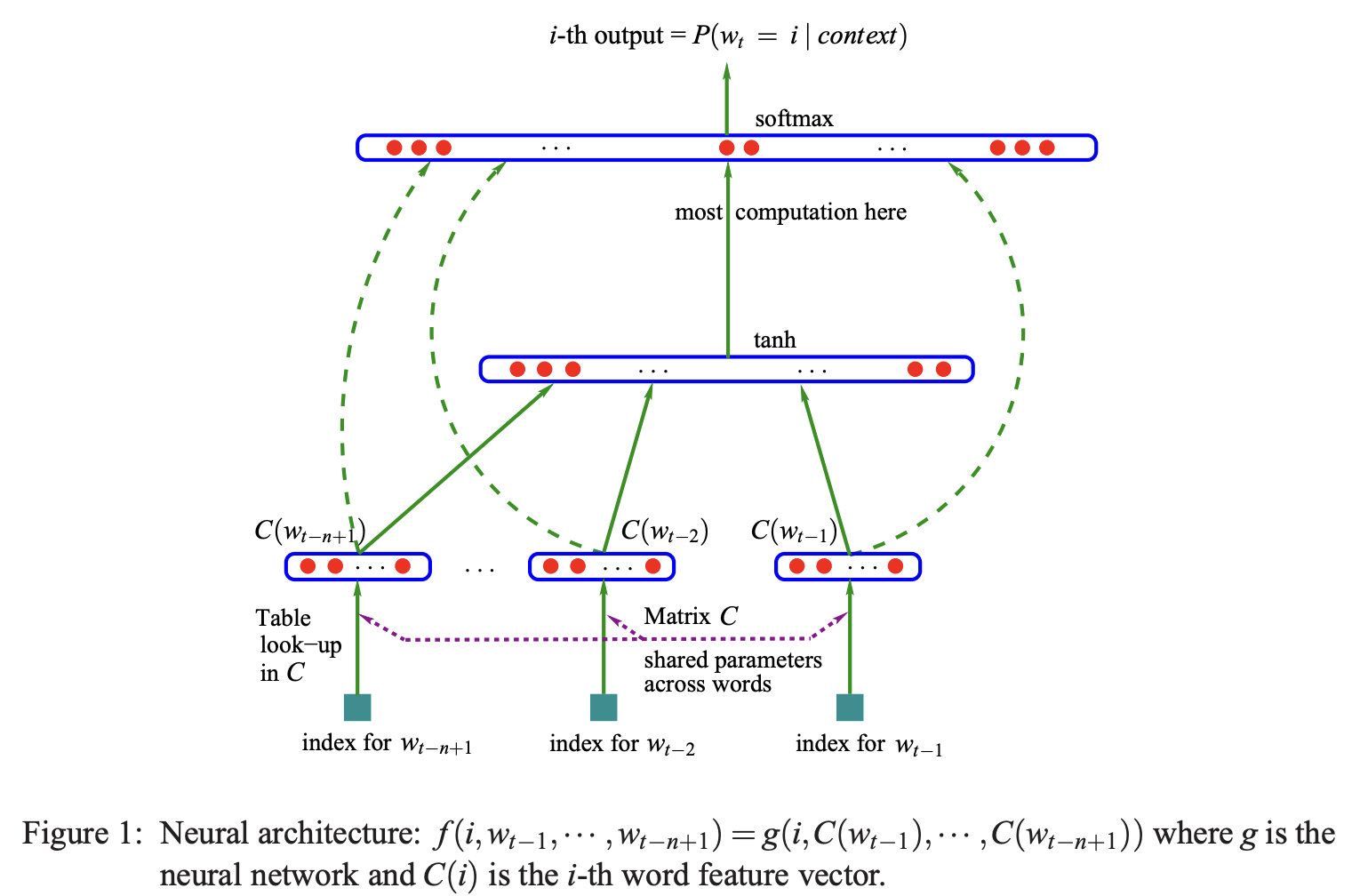
Bengio et al. (2003) neural language model: word embeddings → hidden layer → softmax over vocabulary
Neural networks excel across diverse domains
Computer Vision
CNNs for image classification, object detection, segmentation
Reinforcement Learning
Deep Q-networks, policy gradients for game playing, robotics
Bioinformatics
Protein structure prediction (AlphaFold), genomics
Recommendations
Neural collaborative filtering, content-based systems
- Same fundamental principles (backprop, gradient descent) apply
- Architecture choices encode domain-specific inductive biases
Part 6: Further Reading and Historical Notes
Key references for deeper understanding
Textbooks:
- Goodfellow, Bengio, & Courville (2016), Deep Learning — comprehensive theory and practice
- Jurafsky & Martin, Speech and Language Processing Ch. 6-8
Key milestones in neural network history
Foundations
1943 — McCulloch-Pitts neuron
1958 — Perceptron (Rosenblatt)
1969 — Perceptrons book → AI Winter
Revival
1986 — Backpropagation
1990 — Elman RNNs
1997 — LSTM (Hochreiter & Schmidhuber)
Modern Era
2012 — AlexNet → Deep learning revolution
2017 — Transformer architecture
2018 — BERT, GPT
Summary: Neural Networks - Key Takeaways
- Architecture: Networks of neurons organized in layers; feedforward vs. recurrent
- Learning: Supervised learning minimizes loss via gradient descent
- Backpropagation: Efficient gradient computation using the chain rule
- Optimization: SGD, Adam; regularization (dropout, L2) prevents overfitting
- Challenges: Vanishing/exploding gradients addressed by careful design
- Applications: Text classification, language modeling, and beyond
Questions?
Coming up next: Transformers and attention mechanisms
Resources:
- Goodfellow et al. Deep Learning (free online)
- 3Blue1Brown neural network videos (visual intuition)
- PyTorch tutorials (hands-on practice)